اهداف آموزش: آشنایی با روش حل صریح و ضمنی در حل معادلات، معرفی اصول روش حل Explicit و Implicit ، شناخت حلگرهای Implicit و Explicit آباکوس، مزایا و محدودیتهای روش Implicit و Explicit در آباکوس، تفاوت روش حل صریح و ضمنی
همانگونه که در مطالب قبلی نیز اشاره شد، روش اجزاء محدود یک روش ریاضی و عددی جهت حل معادلات دیفرانسیل است (تاریخچه اجزاء محدود). برای حل مسائل دینامیکی، دو روش در نرمافزارهای تحلیل مورد استفاده قرار میگیرد: روش Implicit یا در اصطلاح ضمنی و روش Explicit یا صریح. هریک از این روشها دارای تواناییها و محدودیتهایی هستند که در ادامه به آنها اشاره خواهیم کرد. از آنجایی که فراگیری این بحث نیازمند اطلاعات حوزه اجزای محدود است، به شکل مختصر اشارهای به آن خواهیم کرد.
واژه اجزاء محدود به زیبایی بیانگر روش مورد استفاده در نرمافزارهای تحلیلی این حوزه است. بهشکل کلی پروسه حل روند زیر را طی میکند:
تقسیم مدل هندسی به اجزای کوچکتر (و با تعداد محدود)، محاسبه میزان تغییر شکل و جابجایی مجموعه با روابط ماتریسی، رسیدن به میزان نیرو و تنش در سازه
اصول و معادلات حاکم بر اجزاء محدود
برای سهولت موضوع سادهترین عضو در علم مکانیک را به خدمت میگیریم: فنر ! تغییر شکل، جابجایی و نیرو از مباحثی است که به دنبال آن هستیم و فنر در عین سادگی نیاز ما را به خوبی مرتفع میسازد. چنانچه به فیزیک دبیرستان رجوع کنید اولین معادله در خصوص فنر را بخاطر میآورید (البته کمی آنرا ارتقا میدهیم و در قالب ماتریسی بیان میکنیم):
[F]=[K].[x]
[K] ماتریس سختی است و طبیعتاً نیرو و جابجایی نیز مفهوم ماتریسی پیدا کردهاند. روش حل این معادله به این صورت است:
[F]=[k].[x] → [k-1].[F]=[k-1].[k].[x] → [k-1][F]=[x]
آنچه گفته شد مربوط بود به مسائل استاتیک بود که در آنها زمان بینهایت است. تغییرات نسبت به زمان بسیار آهسته بوده و در معادلات، زمان حذف شده است. هنگامی که زمان در معادله فنر وارد شود معادله زیر پدید خواهد آمد.
Mx”+kx=f
به چند سطر قبل بازگردید. مدل هندسی به چند بخش تقسیم شده و (در بیانی ساده جهت فهم موضوع) باید با حل معادله فوق جابجایی پیدا شود تا بعد از آن نیرو و در نتیجه تنشها محاسبه گردند.
مقایسه روش Explicit و Implicit (تفاوت روش صریح و ضمنی)
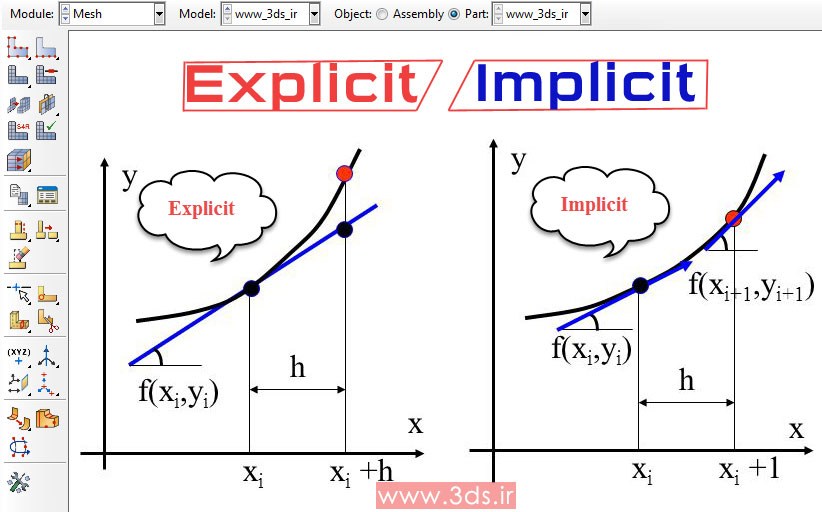
بسیار خب! به سراغ بحث Explicit و Implicit بازگردیم. تفاوت میان دو روش Explicit و Implicit در روش ریاضی حل این معادله است. زمان در لحظه جاری را t و نمو زمان در حل را t∆ در نظر بگیرید. قصد نداریم تا با روابط پیچیده ریاضی شما را سردرگم کنیم زیرا بدون شک برای شما جذاب نخواهد بود، در نتیجه در چند جمله مختصر تفاوت را برایتان شرح میدهیم:
- در روش Implicit معادله مذکور برای زمان t+t∆ حل میشود، وضعیت حل در زمان t+t∆ هنوز مشخص نیست و با حدس اولیه و استفاده از روش نیوتن- رافسون برای حل معادله تا رسیدن به یک جواب همگرا، عمل حل مسئله انجام خواهد شد.
- در روش Explicit معادله مورد نظر با استفاده از مشخص بودن وضعیت جاری مسئله (در زمان t) برای زمان t+t∆ حل میشود، وضعیت مسئله در زمان t مشخص است و ماتریس سختی نیز در این لحظه معلوم خواهد بود. معادله مورد نظر به شکل مستقیم حل میشود:
kt . ∆x=∆F
خبری از حلقه تصحیح و تکرار نیست، همگرایی جواب (که مفصلاً مورد بحث قرار خواهد گرفت) بررسی نمیشود و از گامدهی زمانی کوچک و پایدار برای حل بهره میبرد.
حوزه کاربرد، محدودیتها و نقاط قوت روش حل صریح و ضمنی در مطلبی جداگانه خدمت شما دوستان گرامی ارائه خواهد شد.
تذکر: در تاریخ 15 اسفند 94 آموزشی تحت عنوان “مقایسه Explicit و Implicit و واکاوی حوزه کاربرد آنها” در سایت قرار گرفت.
علاقمندان میتوانند از کتاب The Finite Element Method for Solid and Structural Mechanics ; O.C.Zienkiewicz & R.L.Taylor; 6th Edition; Elsevier Press جهت ارتقای دانش خود در این موضوع استفاده کنند.
منبع : آکادمی نرمافزارهای مکانیک

سایتتون عالی هست. نکات مهم و پیچیده رو خیلی ساده و مختصر بیان کردید که واقعا دونستنشون ضروری هست.
ممنون.
اون دو خط اول فک کنم صریح و ضمنی جاشون باید عوض شه
با سلام
از اظهار لطف و نظرات انرژی بخش شما بسیار سپاسگزارم
نکته سنجی شما قابل تحسینه، اون اشتباه تایپی هم اصلاح شد
ممنونم از شما
مانا و برقرار باشید . . .
سلام آقای سروری. با توجه به مقاله بالا،
1- در روش implicit آیا در لحظه t وضعیت مساله مشخص است یا خیر؟
2- آیا گام زمانی در روش implicit به اندازه کل زمان حل مساله است یعنی آیا روش implicit تنها یک گام زمانی بین وضعیت اولیه و نهایی در نظر میگیرد و به همین خاطر در حالتهایی که بین حالت اولیه و نهایی اختلاف زیادی وجود دارد مساله واگرا میشود؟
سلام
پاسخ هر دو سؤالتون منفیه
شما میتونید به کمک پایین آوردن گام Initial حل، بار را در چند بخش و به تدریج به سازه وارد کنید؛ حالا اگر این گام بزرگ باشه و مقدار بار اعمالی هم عدد قابل توجهی باشه ممکنه نرمافزار در همگرا کردن حل به روش نیوتن – رافسون با اشکال مواجه بشه
موفق باشید . . .
پس فرق روش implicit و explicit تنها در روش حل معادله است که روش implicit از روش حدس اولیه و تکرار حلقه ای براساس روش نیوتن- رافسون مساله را حل میکند ولی روش explicit حلقه ندارد و از روش مستقیم (و نه روش نیوتن-رافسون) مساله را حل میکند؟
اگر جواب پرسش فوق مثبت است، در اینصورت هر دو روش باید برای کلیه حالتها جواب بدهند مثلا برای بارگذاری ضربه ای، با انتخاب گامهای کوچک میتوان از روش implicit هم استفاده کرد و یا در بارگذاری استاتیکی باید بتوان از روش explicit هم استفاده کرد (در اینصورت شتاب گره ها صفر است و مساله از روش explicit هم قابل است)؟
من مقاله دیگر شما با عنوان مقایسه Explicit – Implicit و واکاوی حوزه کاربرد آنها را نیز خوانده ام ولی هنوز اینکه چگونه و چرا در یک مساله تصمیم بگیریم که از کدام روش استفاده کنیم برایم روشن نشده است. ممنون میشوم دقیقتر توضیح دهید
اگر واقعاً پست مربوط به واکاوی حوزه کاربرد را با دقت مطالعه کنید پاسخ سؤالتون را خواهید گرفت
خیلی واضح، شفاف و صریح در اون پست نکات لازم را توضیح دادهام
موفق باشید . . .
سلام.
ببخشید در نرم افزار آباکوس در تنظیمات حل گزینه های coupled و uncoupled وجود داره، تفاوت این گزینه ها در چیه؟ و جوابهایی که از هر راه حل به دست میان چه تفاوتی با هم دارن؟
سلام
حلگر کوپل زمانی مورد استفاده قرار میگیره که شما حلهای وابسته به هم داشته باشید؛ مثلا کوپل حرارتی – مکانیکی؛ یعنی مسئله شما از دو نقطه نظر حرارتی و مکانیکی وابسته به هم هست و تحلیل مکانیکی تحت تأثیر حل حرارتی قرار داره و نمیشه به شکل مستقل به بررسی هر کدام پرداخت
سلام
در بحث ضربات پی در پی چگونه می توان اغتشاشات رو کاهش داد تا جابجایی ناشی از این ضربات به راحتی در نمودارهای جابجایی سرعت یا شتاب دیده شود، روش مورد استفاده dyn-exp هست، از جنرال کانتکت استفاده شده و خواص کانتکت بصورت ضریب اصطکاک ٠.۶ و هارد کانتکت می باشد.
ممنون جناب مهندس سروری
سلام
بررسی در این زمینه نداشته ام
ممنون جناب سروری
با این شرایطی که بیان شد کدام المان مناسب تر هست ؟
ایا میتونم از روش dyn-imp استفاده کنم!؟ هر کاری میکنم نمودارها بسیار اغتشاش داره
وجود نویز در مسائل پلاستیسیته که با حلگر Explicit حل میشن دور از انتظار نیست
دلیل عمده این موضوع به عدم تطابق یا در اصطلاح “mismatch” بین فرکانس درخواستی شما برای ثبت نتایج و گام زمانی پایدار حل در مسئله برمیگرده
گام زمانی پایدار حل در حلگر Explicit با سرعت انتشار موج تنش در المان ارتباط داره، حالا تصور کنید خروجی در یک نقطه انتگرالگیری مشخص، زمانی که موج تنش در این نقطه انتگرالگیری وجود داره با زمانی که موج تنش در این نقطه نیست متفاوت خواهد بود
همین موضوع باعث وجود نویز در نمودارها و نتایج خروجی خواهد شد؛ بهترین راه هم استفاده از فیلتر برای حذف نویزهای شدید در نتایج هست
آباکوس فیلترهای مناسب و خوبی برای این موضوع داره ؛ در قسمت operate on XY data فیلترهایی مثل saeGeneralFilter (دستههای گوناگون با CM های متفاوت) وجود داره که میتونید استفاده کنید
موفق باشید . . .
سلام.وقتتون بخیر.خیلی ممنونم از مطالب مفیدتون.
من یک تحلیل دینامیکی دارم انجام میدم که زمان خیلی کوتاه و شتابها خیلی زیاد هستند. این مکانیزم یک مکانیزم با حرکت نوسانیه. مشکلی که هست اینه که با این که شرایط مرزی تا پایان حل تغییر نمیکنه اما تنشها سیکل به سیکل کمتر و کمتر میشن.به نظر شما مشکل از کجاست؟
ممنونم از پاسختون
سلام
در جریان روند مدلسازی شما قرار ندارم؛ نظر خاصی هم نمیتونم بدهم
سلام ممنون بابت سایت خوبتان نمیدونم ایا سوالم رو در جای مناسب مطرح کردم؟
شار حرارتی رو برای شبیه سازی سوراخکاری اعمال کردم و با المان های درشت نتیجه گرفتم اما وقتی اجزا رو کوچک تر میکنم سرعت سیستم بسیار پایین میاد و hang میکنه و پیام زیر با رنگ قرمز در پایین صفحه میاد:
…The memory allocation for jobwas increased
دلیلش چی هست و برای حل شدن چه باید کرد
تشکر
سلام
طبیعتاً وقتی شما از المانهای بیشتر استفاده میکنید سرعت حل کاهش پیدا میکنه (چون به همان نسبت حجم محاسبات افزایش پیدا کرده) و در این حالت اگر سیستم شما به اندازه کافی قدرت نداشته باشه کاهش سرعت و hang کردن سیستم پیش خواهد آمد
با سلام
من یه تحلیل دینامیک اکسپیلیست دارم که قراره یک بار شوک شتابی مثلثی به یه طرف سازه وارد بشه. توی این تحلیل
وقتی از کانتکت Tie استفاده میکنم شوک در سازه توزیع میشه و با گذشت زمان کم میشه. ولی وقتی کانتکت
تانجنسیال و هارد کانتکت استفاده می کنم شتاب در محل هایی که تماس تعریف شده به چندین برابر مقدار ورودی میرسه!
ممنون میشم اگه راهنمایی کنید
سلام
قید Tie عملا دو قطعه را مثل جوش به هم متصل میکنه ولی وقتی شما کانتکت تعریف میکنید قضیه فرق میکنه
مکانیزمهای فشار – تداخل فعال میشه و محاسبات خاص خودش را داره
ممکنه مشکل از این موضوع ناشی بشه
شما حتی میتونید یک تست ساده بکنید
دو تا مکعب روی هم قرار بدهید و بینشون کانتکت تعریف کنید، با سایز شبکه slave و master بازی کنید (مثلا سایز برابر برای هر دو بگیرید) و یک فشار هم به جسم بالایی اعمال کنید
بعد وضعیت نیرو در سطح تماس را مقایسه کنید
با دو مکعب امتحان کردم ، باز هم زیاد میشه
به نظرتون راه چاره چی میتونه باشه ؟
عرض بنده هم همین بود که به پارامترها بستگی داره دوست عزیز
انتخاب master و slave، سایز مناسب شبکه برای هر کدام و . . . اثر گذاره
سلام
من یک تحلیل حرارتی Explicit انجام دادم . روش اثبات حل Explicit چگونه است؟
سلام
منظورتون از اثبات حل را متوجه نمیشم
با سلام وقتی بار گسترده سهمی درجه دو به تیر وارد میشود به راحتی محاسبه میشود ولی اگر این تابع درجه دو به توابع بالاتر برود مثل درجه پنج یا شیش خطا خواهد داد چطور میتونی توابع شکل مربوط به سهمی درجه پنج رو محاسبه کنیم
سلام
متوجه نشدم
شفاف تر مطرح بفرمایید
سلام جناب سروری، سایت شما رو تازه پیدا کردم و مطالب بسیار مفیدی تونستم پیدا کنم برای درک بهتر آباکوس واقعا خدا خیرتون بده
من فعلا مبتدی هستم و تازه شروع به کار با آباکوس کردم حقیقتا خیلی ویدئو ها دیدم اما نیازمند راهنمایی هستم ، حقیقتا یک تحلیل رو باید ارائه بدم که ممنون میشم یک راهنمایی مختصر به من بدید
یک استوانه هست با دستگاه crosshead تحت فشار قرار داره و سطح بالایی رو فشار میده که بازوی کراس هد هم با سرعت 0.2 میلی متر بر ثانیه داره حرکت میکنه و فشار ایجاد میکنه، سطح زیرین استوانه هم گیر دار هست
برای حل که باید از روش Expilicite انجام بدیم درسته ؟ چون فاز پلاستیک و تغییر شکل رو میخوام بررسی کنم و سوال من اینه که
1. من میتونم استوانه ام رو مدل کنم و فقط برای قسمت load یک شرط velocity بدم و اون رو مساوی 0.2 میلی متر بر ثانیه قرار بدم , و سطح رویین استوانه ام رو درگیر این سرعت کنم ؟
یا اینکه
2. استوانه رو مدل کنم و برای مدل سازی کراس هد ، یک استوانه صلب رو تعریف کنم و تماس سطح به سطح بدم بدون هیچ فاصله ای (یعنی فاصله سطح رویین استوانه و سطح جسم صلب 0 باشه یعنی با هم در تماس باشند که ضربه اتفاق نیفته ) و بعدا به جسم صلب قید سرعت رو بدم ، من فکر میکنم توی این حالت به خاطر تماس باید اصطکاک هم وارد مسئله بشه که نیازمند تعریف ضریب اصطکاک هست و خودش ممکنه تنش های سطحی ایجاد کنه و حل آخر رو تحت تاثیر قرار بده
حالا اول اینکه من درست دارم فکر میکنم برای شبیه سازی یا خیر ؟
و اینکه اگر درسته روش اول رو استفاده کنم یا روش دوم رو به نظر شما ؟
اگر نظر شما رو هم بدونم ممنون میشم که راه رو درست طی کنم
خیلی خیلی ممنون میشم اگر پاسخ بدید و یک گرهی از مشکل من باز کنید
بسیار سپاس گذارم از وقتی که برای نوشتن مطالب و خواندن نظرات و پاسخ دهی میگذارید واقعا ارزشمند هست .
سلام
روش کلی که اشاره کردید درسته
پیشنهاد من استفاده از روش دوم هست
در مورد ضرایب اصطکاک و تعریف رفتار تماسی و . . . هم در سایت مثالهایی وجود داره؛ میتونید الگوبرداری کنید
متشکرم
سلام جناب سروری
با تشکر از سایت خوبتون . سوالی دارم.
یک ستون با مقطع باکس فولادی رو مدل کردم و با Implicit step تحلیل کردم. نتایجش خوب بود. همون مدل رو copy کردم و استپ رو Explicit کردم. وقتی ران گرفتم در زمان 20% زمان تحلیل قبلی ستون لا خورد. (بارگذاری و متریال مثل حالت قبله و فرقی نکرده). بارگذاری هم توسط کشیدن کابلهای بلند به بالای ستون انجام میشه و پای ستون هم فیکس فرض شده. به نظرتون مشکل از کجاست؟
با تشکر
سلام
مشکل اینجاست که زمان حلگر implicit و explicit اصلا قابل مقایسه نیست
زمان در حلگر implicit فقط یک معیار برای اعمال بار توسط نرم افزاره ولی در حلگر explicit زمان مفهوم واقعی خودش را داره
سلام
وقت بخیر
با توجه به اینکه تعیین زمان حل(end time) در حل explicit بسیار مهم میباشد و در نتایج تاثیر گذار میباشد این زمان حل رو از کجا بیاریم؟
مثلا در یک مساله impact زمان انتهای حل چگونه تعیین میشود؟؟
سلام
زمان برخورد باید چیزی باشه که در واقع اتفاق میافته
سلام
وقتتون بخیر
معیار زمان حل در explicit چیست؟؟
چون زمان حل در نتایج بسیار تاثیر گذاره.
مثلا در یک مساله impact زمان حل رو از چگونه تعیین کنیم؟؟
سلام
معیار، زمان واقعی مسئله شماست