اهداف آموزش: در این مثال کاربردی آموزش آباکوس، به بررسی مدلسازی فرآیند جازدن قطعات در یکدیگر میپردازیم. در طی فرآیند snap-fit یا جا زدن قطعات، مسئله استاتیکی بدلیل وجود تماس ناگهانی در فرآیند، به یک مسئله با ماهیت دینامیک تبدیل میشود. این پدیده سبب میشود تا زمانی که مسئله را با یک حلگر استاتیکی حل میکنید، مشکلاتی در روند همگرایی مسئله ایجاد شود. این مثال آموزشی آباکوس به شما نشان خواهد داد که چگونه با معرفی Viscous Stabilization یا حل مسئله از طریق حلگر دینامیک آباکوس، بر ناپایداریهای دینامیکی ایجاد شده غلبه کنیم.
پیشنیازها:
- اگر از همراهان همیشگی سایت آکادمی نرمافزارهای مکانیک باشید، بهخاطر میآورید که پیشتر به شکل مفصل و در یک آموزش اختصاصی، مدلسازی فرآیند snap-fit در آباکوس را به شما همراهان گرامی آموزش دادیم. از اینرو توصیه میشود پیش از آغاز مطالعه این آموزش جهت آشنایی بیشتر با فرآیند snap-fit آموزش تحلیل اتصال جازدنی در آباکوس را مطالعه فرمایید.
- با هدف صرفهجویی در وقت و پرداختن به اصل موضوع، فایل cae این تمرین را برای شما آماده کردهایم. برای استفاده بهینه از زمان و تسریع فرآیند یادگیری، در اولین گام فایل cae آموزش را دانلود کنید.
- حوزه کاربرد: مهندسی مکانیک، اطلاعات بیشتر: simuleon.com
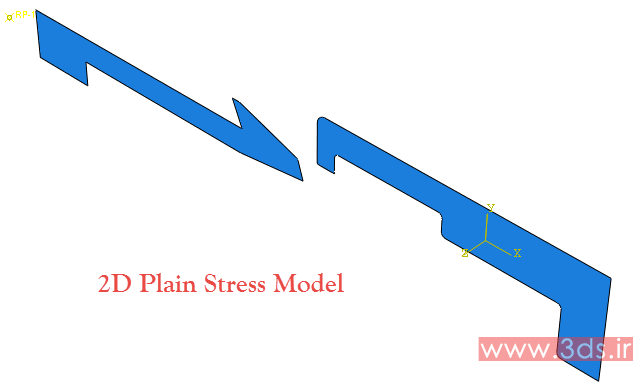
پس از دانلود، فایل مربوطه را که حاوی هندسه قطعات، خواص مکانیکی، موقعیت قرارگیری قطعات نسبت به یکدیگر، مشزنی قطعات و برخی شرایط مرزی است باز کنید (فایل مربوطه با نسخه 6.14 آباکوس تهیه شده است). همانطور که در شکل زیر نیز مشاهده میکنید، برای آموزش از یک مدل دو بعدی با المانهای تنش صفحهای استفاده شده است.
تکمیل فرآیند مدلسازی snap-fit در آباکوس
برای مدلسازی فرآیند snap-fit در این مسئله، از یک ماده فرضی با مدول یانگ 3 گیگاپاسکال و نسبت پواسون 0.4 استفاده شده است. همچنین فرآیند شبکهبندی و گسستهسازی قطعات به کمک المانهای چهار وجهی ضورت پذیرفته است. با ورود به ماژولهای Property و Mesh از صحت موارد بالا اطمینان حاصل کنید.
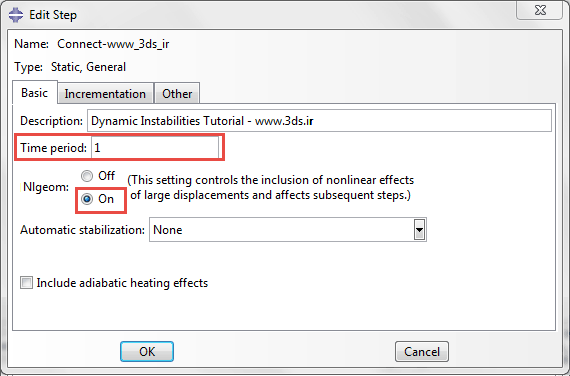
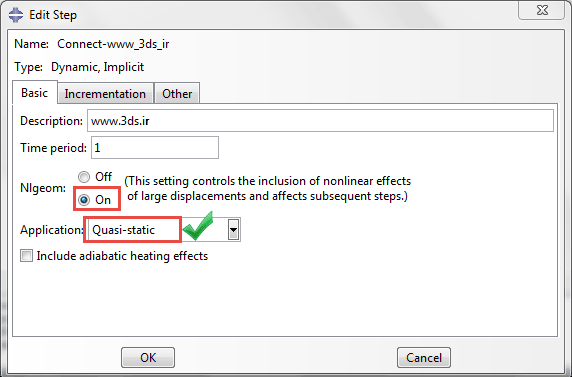
در ادامه به ماژول step رفته و یک گام زمانی حل از نوع Static, General با Time Period یک ثانیه تعریف کنید. فراموش نکنید با توجه به ماهیت مسئله گزینه Nlgeom را فعال کنید (Nlgeom در آباکوس چیست؟)
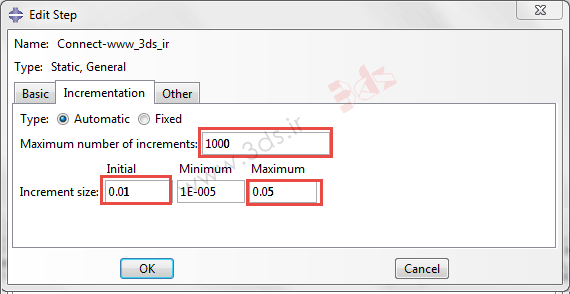
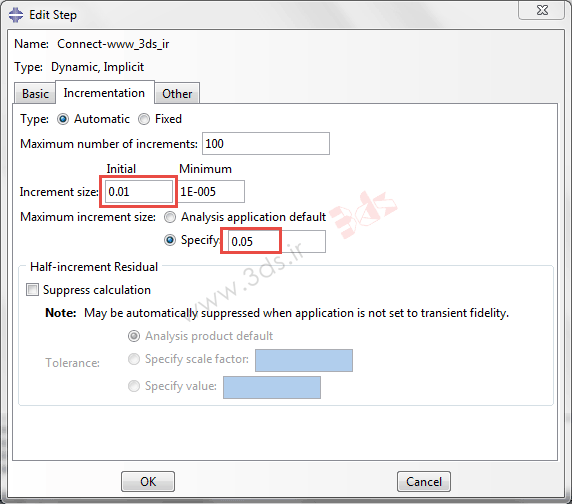
سپس به زبانه Incrementation رفته و تنظیمات زیر را انجام دهید.
تعریف قیود و خواص تماسی در آباکوس
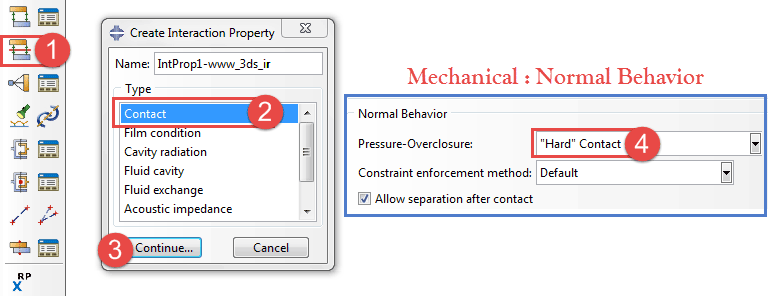
برای تعریف خواص تماسی وارد ماژول Interaction آباکوس شوید. سپس مانند تصویر زیر، خواص تماسی نرمال را برای فرآیند مدلسازی در نظر بگیرید.
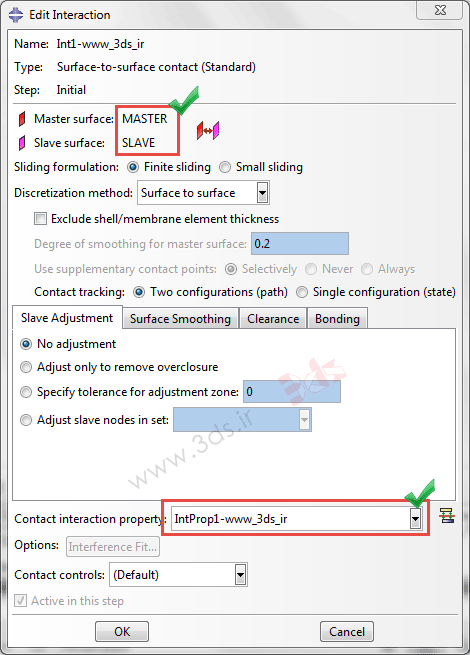
سپس تماسی از نوع Surface-to-Surface بین دو قطعه ایجاد کنید. برای انتخاب سطوح Master و Slave میتوانید از setهای تعبیه شده در فایل cae استفاده نمایید.
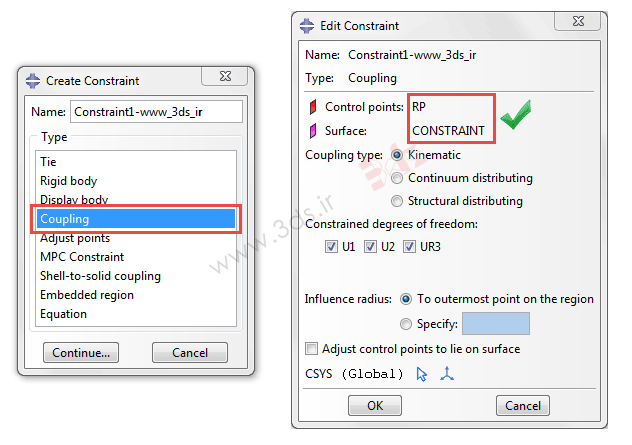
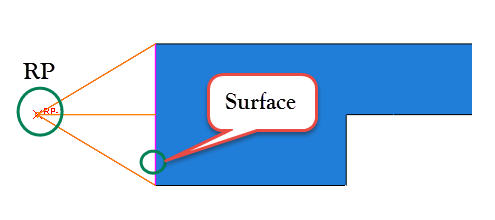
در ادامه، قیدی از نوع کوپلینگ برای مسئله تعریف کنید(انواع قیدها در ماژول Interaction آباکوس). برای مشخص کردن RP و surface میتوانید از سطوح از setهای از پیش تعریف شده در فابل cae استفاده نمایید.
تعریف شرایط مرزی در آباکوس
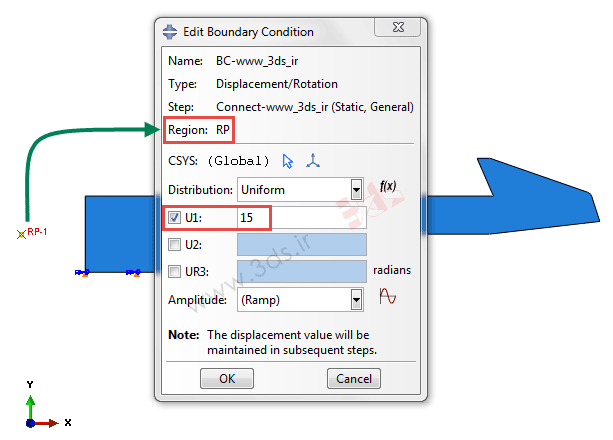
برای تعریف شرایط مرزی حاکم بر مسئله وارد ماژول Load شوید. شروط مربوط به تقارن در فایل cae ایجاد شده است؛ کافیست به نقطه RP قطعه جابجایی 15 واحدی در جهت U1 اعمال کنید (بارگذاری در آباکوس).
در گام آخر مسئله را برای حل به ماژول Job ارسال کنید و از گزینه Monitor برای رصد روند حل استفاده نمایید.
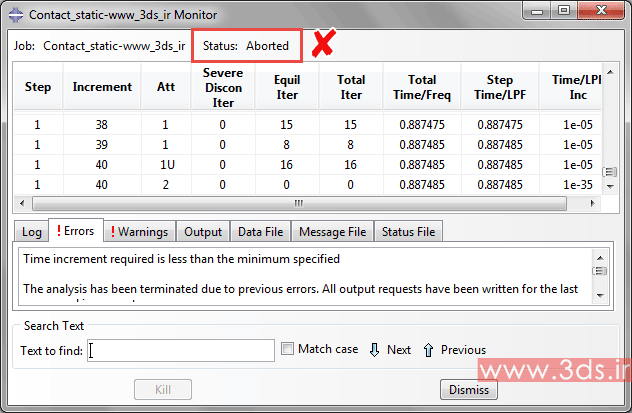
همانگونه که مشاهده میکنید، با تنظیمات شرح داده شده همگرایی در حل مسئله رخ نمیدهد.
ناپایداری دینامیکی در آباکوس – راه حل اول: استفاده از Viscous Stabilization
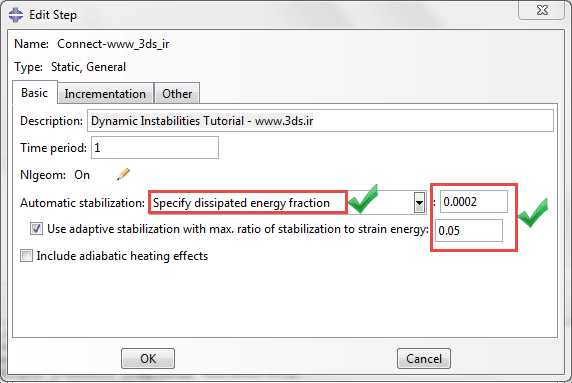
استراتژی کاربردی اول در غلبه بر این مشکل تماسی، افزودن پایدارساز ویسکوز یا Viscous Stabilization به مدل است. برای این منظور، به ماژول step بازگردید. حال، مقابل گزینه Automatic Stabilization حالت Specify dissipated energy fraction را انتخاب و بر روی دکمه OK کلیک کنید (حالات پیش فرض را تغییر ندهید).
حال مجدداً مسئله را با تغییر ایجاد شده حل کنید.
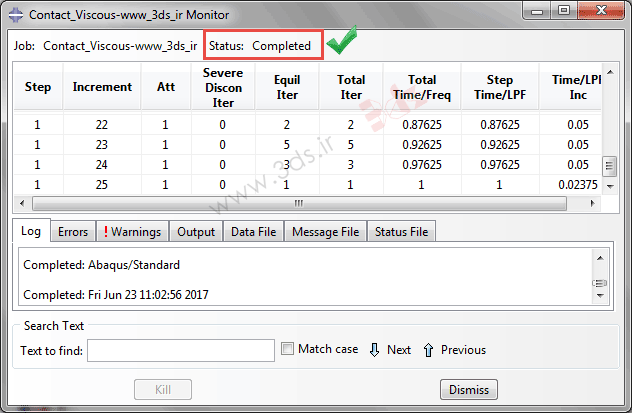
همانطور که ملاحظه میکنید مسئله با اضافه شدن پایدارساز ویسکوز همگرا شده است.
ناپایداری دینامیکی در آباکوس – راه حل دوم: استفاده از حلگر دینامیکی
راه حل دوم در حل ناپایداریهای دینامیکی که در حین حل رخ میدهد، استفاده از یک حلگر دینامیک ذاتی است. جرم تعریف شده در سیستم برای حلگر دینامیک سبب میشود تا پایداری حل در مسئله به سرعت صورت پذیرد. به ماژول step بازگردید و گام حل را با یک گام Dynamic , Implicit جایگزین نمایید. تنظیمات مربوط به این حلگر را مطابق شکل زیر انجام دهید.
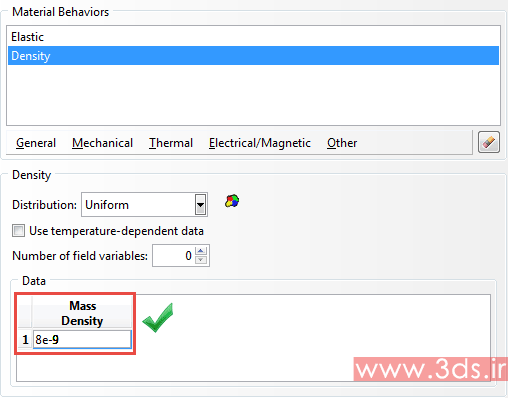
با توجه به ماهیت دینامیک مسئله، به ماژول property وارد شده و چگالی معادل 8E-9 tonn/mm3 را برای قطعات در نظر بگیرید. از آنجایی که در حال حل یک مسئله دینامیکی هستیم، ماتریس جرم سیستم شکل خواهد گرفت.
در آخرین گام پس از این راه حل، مسئله را حل نمایید.

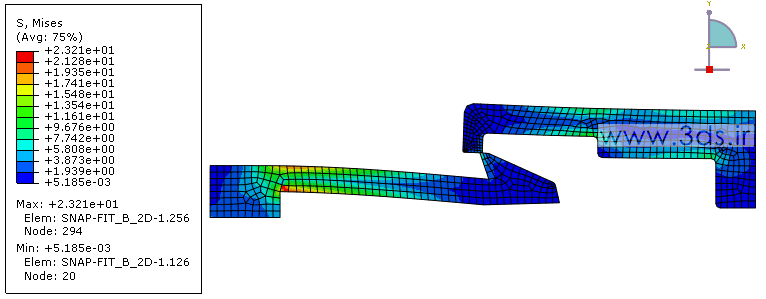
همانطور که ملاحظه میکنید با استفاده از تکنیک فوق، حل مسئله همگرا شده است. شکل زیر نیز کانتور تنش فون میسز در لحظه درگیری دو قطعه را نشان میدهد.

سلام خسته نباشید آیا می توان از step :Dynamic, Temp_disp, Explicit
برای بررسی رفتار تغییر شکل های پیش رونده (رچتینگ) برای لوله ای که همزمان تحت فشار، ممان دینامیکی و بارگذاری حرارتی که به صورت پریودیک است استفاده کرد؟برای این کار از مدل سخت شوندگی ترکیبی جهت حل مسئله استفاده میشه .
سلام
پیش بینی پدیده هایی مثل Ratcheting یا shakedown و اثر باوشینگر، به مدل سخت شوندگی و نوع بارگذاری شما بستگی داره
سلام مهندس ممنون از پاسختون، من وقتی از step: dynamic, Temp_disp, Explicit
استفاده میکنم دیگه از استپ static,General که برای لوله ی تحت فشار نیاز دارم نمی تونم استفاده کنم. ضمنا وقتی از استپ coupled temp_displacement استفاده میکنم، وقتی که run میکنم مدل ترکیبی (شابوشی _ایزوتروپیک) را قبول نمیکنه. بنظرتون چکار کنم. ممنونم
سلام
اگر مدل خاصی مدنظرتون باشه که به شکل پیش فرض نمیتونید مدل کنید باید از سابروتین نویسی کمک بگیرید
سلام مهندس با عرض معذرت، این امکان وجود داره با همان استپ Dynamic Temp_disp Explicit برای لوله ای که همزمان تحت فشار ثابت، بار سیکلی و بارگذاری حرارتی بصورت پریودیک استفاده شود.
سلام
خب با یک مثال ساده امتحان کنید
ببخشید مهندس، وقتی امتحان می کنم این ارور میده the ratio of deformation speed to wave speed exceeds 1.0000 in at least one element. This usually indicates an error with the model definition
اگه از مشکل مربوط به مدل سخت شوندگی ترکیبی باشه باید از سابروتین UMAT برای تعریف مدل استفاده کنم درسته؟
سرعت تغییر شکلتون بالاست
سلیس نوشته
سلام و وقت بخیر
آقای سروری من برای پیچ کردن یک ایمپلنت در دهان به مشکل خوردم. از حلگر dynamic explicit استفاده میکنم روند حل خیلی طولانیه حدود 12 ساعت گذاشتم نتیجه نداد و پیچ با یک گشتاور باید داخل استخوان رزوه شی ولی وقتی پیچ به استخوان میرسه جلوتر نمیره حوزه مکانیک شکست هم براش تعریف کردم اما درست نشد
با تشکر
سلام
چه کمکی میتونم بکنم؟
سلام ،من یک ستون کامپوزیت مدل میکنم که نیاز هست بار رو از طریق rigid plateوارد کنم حالا در قسمت dynamic explicitچگالی پلیدو چند باید بدم?(rigid platesرو از طریق مدول الاستیسیته بالا درست کردم نه از طریق constraint)
با عرض سلام و خسته نباشید و ممنون بابت آموزشهای خوبتون. سوالی که داشتم این بود که اگر ستهای مستر و اسلیو رو کاملتر کنیم و به جای 15 میلیمتر، 45 میلیمتر جابجایی رو وارد کنیم (تا بخش صاف انتهایی راستی با نوک اسنپ برخورد کنه) برنامه ارور میده که زمان اینکریمنت کردن از مینیمم کمتره و هرچقدر تلاش میکنم برای برطرف کردن ارور تاثیری نداره. ولی برای طولهایی مثل 30 (که برخورد نداره با انتها) مشکلی پیش نمیاد و خوب شبیهسازی میکنه. چطور میشه مشکل رو برطرف کرد؟
(مورد خاصی نیست ولی دوست دارم واکنش به برخورد با انتها رو ببینم)
سلام
بدیهیه؛ 45 میلیمتر جابجایی یعنی عملا دو جسم تغییر شکل بسیار زیادی را متحمل بشن
خودتون جسم سمت چپ را 45 میلیمتر جابجا کنید ببینید در چه موقعیتی قرار میگیره؛ عملاً از همدیگه رد میشن
حالا چطور باید این المانها تغییر شکل بدن تا این جابجایی اتفاق بیافته؟ ضخامت المانهای قطعه سمت راست باید چقدر بشه که این تغییر شکل اتفاق بیافته؟
این مشکل نیست؛ شبیه سازی باید منطقی و معقول باشه؛ نمیشه هر چیزی را شبیه سازی کرد
شما اگر میخواهید ببینید در برخورد با انتها چه حالتی ایجاد میشه فاصله دو قطعه را استخراج منید و یک مقدار منطقی جابجایی بدید
بنده مطلع هستم که این دو به همدیگه برخورد میکنن، میخوام این برخورد شبیهسازی بشه. چیزی که به نظر من بدیهی به نظر میاد اینه که این فشار زیاد باعث خم شدن قطعه سمت چپ بشه و توی گوشههاش تنش ایجاد کنه. فاصلهٔ این دو نقطه (که قراره برخورد بین اونها شکل بگیره) 31.5 میلیمتره. وقتی 32 هم وارد میکنم ارور میده. حس میکنم باید solver انتخاب شده عوض بشه، چون مسئله به همگرایی نمیرسه.
چیزی هم که میخوام شبیهسازی کنم چیز چندان غیرمعقولی به نظر نمیاد.
با سپاس از پاسخگوییتون.
این بستگی به خواص مادی قطعه داره که چه رفتاری پیدا کنه
ممکنه شما نیاز داشته باشید سایز مش را در اون نقاط تماس بهبود بدید یا حتی از تکنیک ALE استفاده کنید؛ یا remeshing انجام بدید
تغییر نرخ بارگذاری هم میتونه اثرگذار باشه
عوض کردن solver همیشه راه حل نیست
چرا دوست عزیز؛ 45 میلیمتر جابجایی برای اون هندسه منطقی نیست
32 میلیمتر هم وضعیت دو قطعه نسبت به هم جای سؤال داره؛ یک حجم از قطعه سمت چپ به شکل کامل داخل جسم سمت راست قرار میگره و ازش رد میشه
دو تا قطعه که نمیتونن در هم نفوذ کنن؛ پس چه اتفاقی میافته؟
المانها باید تغییر شکل بیش از اندازه تحمل کنن که خود این موضوع مشکل ساز خواهد بود
در همین مثال با 15 میلیمتر هم که دیدید؛ همون خطا را داشت، با تکنیک Viscous Stabilization حل شد
ممنون از مطالب مفیدتون
چرا step جایگزین را بجای Implicit از نوع explicit انتخاب نکردیم؟ ایا انتخاب explicit باعث تغیر زیادی در زمان حل و نتایج این مسئله میشود یا دلایل دیگری دارد ؟
به شکل کلی متد حل implicit پایدارتر از روش explicit هست در نتیجه جایی مثل مثال بالا که مشکلی ایجاد نمیشه تووصیه به استفاده از متد implicit هست