اهداف آموزش: در این آموزش آباکوس شما با مشکلات همگرایی حل در مسائل تماس، Geometric Smoothing در آباکوس، تکنیک Contact Stabilization در آباکوس، شبیهسازی تماس در زنجیر بهوسیله آباکوس، حالتهای نیرو – کنترل و جابجایی – کنترل در آباکوس آشنا خواهید شد.
Convergence در حل مسائل تماس به کمک آباکوس
بدون شک حل مسائل تماسی و برخورد از پیچیدهترین، پرهزینهترین و مشکلترین مسائل در حوزه شبیهسازی اجزاء محدود بهشمار میآید. لزوم انتخاب حلگر مناسب، مکانیزم تماسی صحیح، اندازه المان با کیفیت تنها بخشی از مشکلات پیش رو در حل مسائل تماس بهشمار میرود. اما مشکل وقتی بیشتر خود را نشان میدهد کهه علیرغم انتخاب مناسب پارامترهای مورد اشاره در بالا، همگرایی در حل مسئله رخ نمیدهد. شاید شما نیز با مشکل عدم همگرایی در حل مسائل تماس و برخوردد مواجه شده باشید (خطاهای حل در آباکوس)؛ کلافی سردرگم و پیچیده که شما را وادار کرده حداقل برای یکبار هم که شده روند حل را از اولین ماژول تا ماژول انتهایی مجددا مورد بررسی قرار دهید و با پیادهسازی ترفندهایی، سعی در برطرف کردن مشکل داشته باشید. در این آموزش از مجموعه آموزشهای پیشرفته نرمافزار آباکوس قصد داریم تا شما عزیزان را با دو تکنیک مفید و کاربردی در پایدارسازی حل مسائل تماسی آشنا کنیم: هموارسازی هندسی و پایدارسازی تماس. پس از معرفی اصولل اولیه و ضرورت استفاده و بکارگیری این تکنیکها در آباکوس، سعی میکنیم با ذکر دو مثال کاربردی فرایند تثبیت در آموزش را دنبال کنیم. با ما در این آموزش پیشرفته آباکوس همراه باشید.
هموارسازی هندسی یا Geometric Smoothing در آباکوس
تکنیک هموارسازی هندسی یا Geometric Smoothing میتواند در رفع مشکل برای تمامی سطوحی بکار رود که قابل بیان با یک معادله ریاضی باشند. بهعبارت بهتر چنانچه سطح مورد نظر شما در قالب یک تابع ریاضی قابل بیان است، میتوانید تکنیک هموارسازی هندسی را در آن بکار گیرید. استوانهها، کرهها، سطوح ناشی از دوران و . . . از جمله مواردی هستند که میتوانید با روابط ریاضی معرفی کنید و طبیعتاً تکنیک هموارسازی هندسی در آنها قابل پیادهسازی خواهد بود. اما مگر بیان یک سطح با یک معادله ریاضی چه مزیتی ایجاد خواهد کرد؟
تعریف یک سطح به کمک معادله ریاضی آباکوس را قادر میسازد تا در بکارگیری مکانیزم تماسی، اندازهگیری بسیار دقیقی از معادله فشار – تداخل بین دو سطح درگیر در اختیار داشته باشد. این موضوع به آباکوس کمک میکند تا از تعداد Iterationهای به مراتب کمتری برای همگرایی در حل استفاده کند. شاید توضیحات بالا برای شماا کمی مبهم باشد؛ توصیه میکنیم اصول اولیه را با دقت فراگیرید و سپس به کمک مثالهایی که در ادامه آورده می شود موضوع را به شکل عمیقتر به خاطر بسپارید. پس صبور باشید!
پایدارسازی تماس یا Contact Stabilization در آباکوس
بسیاری از مجموعه مونتاژهای مکانیکی شامل قطعاتی است که با هدف جلوگیری از حرکت جسم صلب (Rigid Body Motion)، بین دو قطعه، تماس برقرار شده است. مدلسازی این قطعات به صورتی که مکانیزم تماس از همان ابتدای حل به شکل پایدار رسیده باشد تقریباً غیرممکن است. شاید بتوان زنجیرها و قطعات پیچیده صنعتی را بهترین مثال در این گروه دانست. در این حالت، چنانچه دو قطعه به شکل کامل با یکدیگر در تماس نباشند و بین آنها گپ وجود داشته باشد (به هر دلیل از جمله ضعف در هندسه ایجاد شده در فایل CAD) همگرایی حل و ممانعت از حرکت جسم صلب در اولین اینکرمنت یک چالش بزرگ به شمار میرود. این مشکل زمانی که از یک بارگذاری نیرو – کنترل (Load-control) در تحلیل آباکوس خود استفاده کنید جدیتر خواهد بود. پایدارسازی تماس یا Contact Stabilization ابزاری مناسب در حل این مشکل خواهد بود.
در این آموزش، یک زنجیر فلزی را در دو حالت جابجایی و نیرویی مورد بررسی قرار خواهیم داد. برای این منظور، دو حالت (کاملاً در تماس و دارای گپ بین دو قطعه) تحلیل میشود تا پتانسیلهای هموارسازی هندسی و پایدارسازی تماس مشخص گردد. برای جلوگیری از اتلاف وقت شما عزیزان، فایل cae مربوط به این آموزش حاوی هندسه، شبکه اجزای محدود و خواص مکانیکی ماده برای دانلود قرار داده شده است. لطفاً پیش از مطالعه ادامه این آموزش، فایل مورد نظر را دانلود نمایید.
- ◄ حوزه کاربرد: مهندسی مکانیک
- ◄ اطلاعات بیشتر: Simuleon
- ◄ تذکر: دانلود فایل cae از لینک زیر:
تکنیکهای حل مسائل تماس در آباکوس
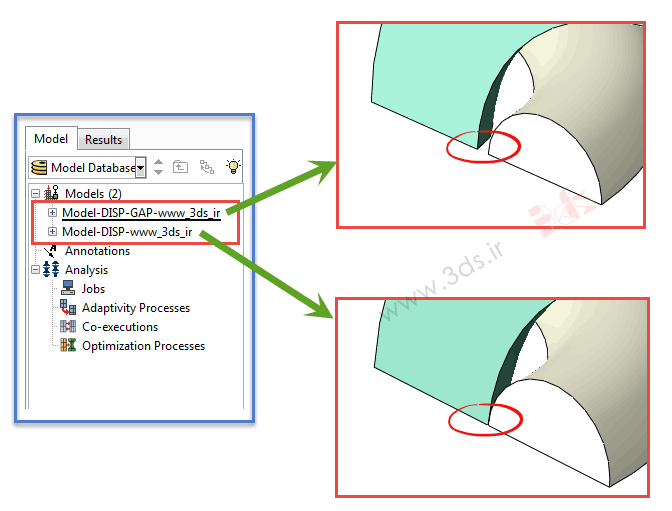
پس از دانلود فایل cae مربوط به این آموزش، آنرا در محیط آباکوس فراخوانی کنید. اگر با دقت به نمودار درختی در سمت چپ محیط کاری توجه کنید متوجه میشوید که این فایل حاوی دو مدل با نامهای Model-DISP و Model-DISP-GAP است که مدل هندسی، شبکه اجزای محدود و متریال مربوط به زنجیر را در خود جای دادهاند. در مدل اول، حلقهها کاملاً با یکدیگر درگیر هستند در حالی که در مدل دوم یک گپ کوچک بین دو حلقه در ماژول Assembly در نظر گرفته شده است.
بدیهی است با توجه به وجود تقارن هندسی و بارگذاری در مسئله، از مدل یک هشتم حلقههای زنجیر استفاده شده است. میتوانید در ماژولهای Property، Step، Load و Mesh آباکوس موارد اختصاص یافته به مدل هندسی را بررسی کرده و از صحت مراحل انجام شده اطمینان حاصل کنید.
حالت اول: درگیری کامل، فرآیند جابجایی کنترل
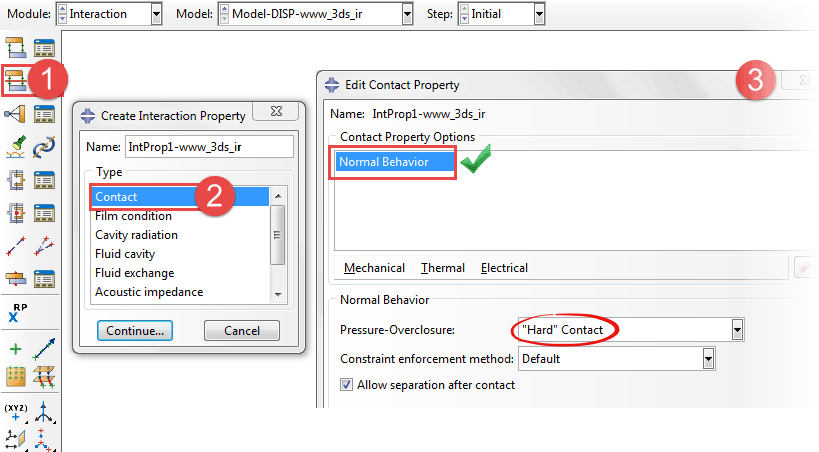
در نمودار درختی، بر روی مدل Model-DISP دو بار کلیک کنید تا بهعنوان مدل مورد نظر برای تحلیل انتخاب شود. با توجه به اینکه مواردی مانند گام حل، خواص مکانیکی، شبکه اجزای محدود و شرایط مرزی در فایل cae گنجانده شده بود، مستقیماً به ماژول Ineraction رفته و مطابق راهنمای تصویری زیر خواص تماسی را تعریف نمایید.
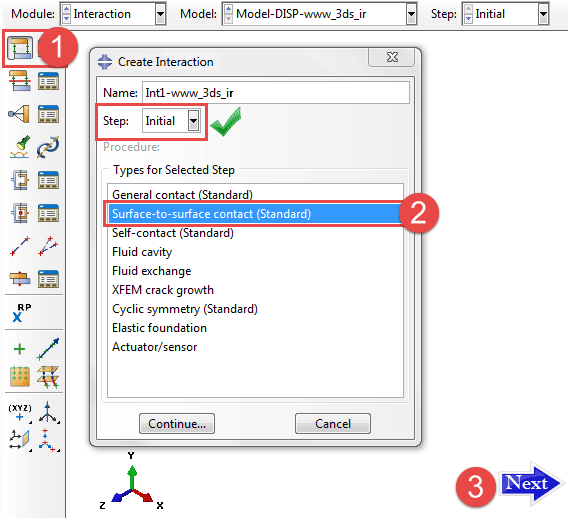
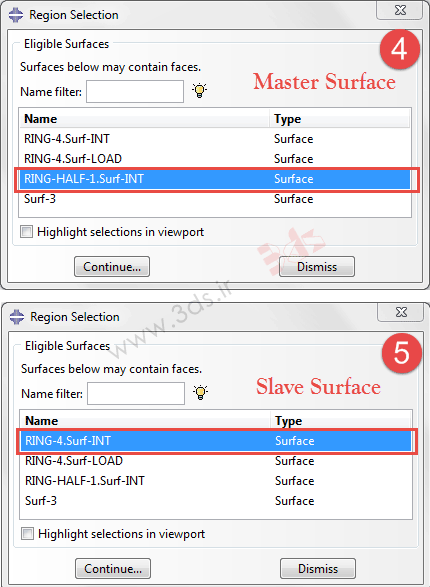
سپس یک تماس از نوع Surface-to-Surface تعریف کنید. برای این منظور گام Initial حل را انتخاب کرده و سطوح Ring-Half.Surf-INT را بهعنوان Master و Ring.Surf-INT را بهعنوان Slave به آباکوس معرفی نمایید (این سطوح قبلا بهعنوان Setهای مجزا در فایل cae آباکوس تعریف شدهاند. فقط کافیست در زمان تعیین سطوح Master وو Slave از پایین صفحه گزینه Surfacess را انتخاب کنید تا لیست سطوح تهیه شده برای شما نشان داده شود).
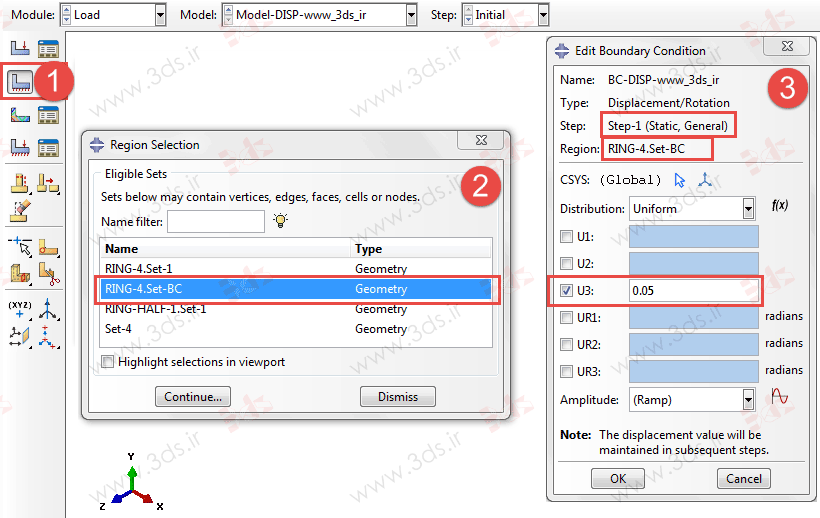
در ادامه به ماژول Load رفته و یک شرط مرزی از نوع Displacement/Rotation در Step-1 به سطح Ring.Set-BC مطابق شکل زیر وارد کنید:
سپس به ماژول Job رفته و مسئله را حل کنید. پیش از Submit کردن حل اطمینان حاصل کنید که از مدل Model-DISP در تحلیل خود استفاده میکنید.
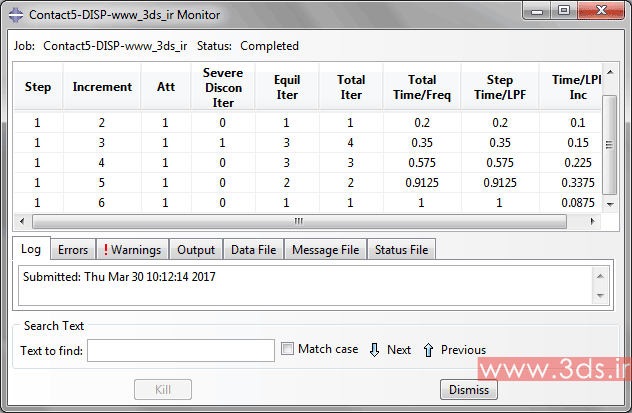
پس از اتمام فرآیند حل، از گزینه Monitor استفاده کرده و تعداد iterationهای لازم برای همگرایی و تکمیل حل مسئله را یادداشت کنید.
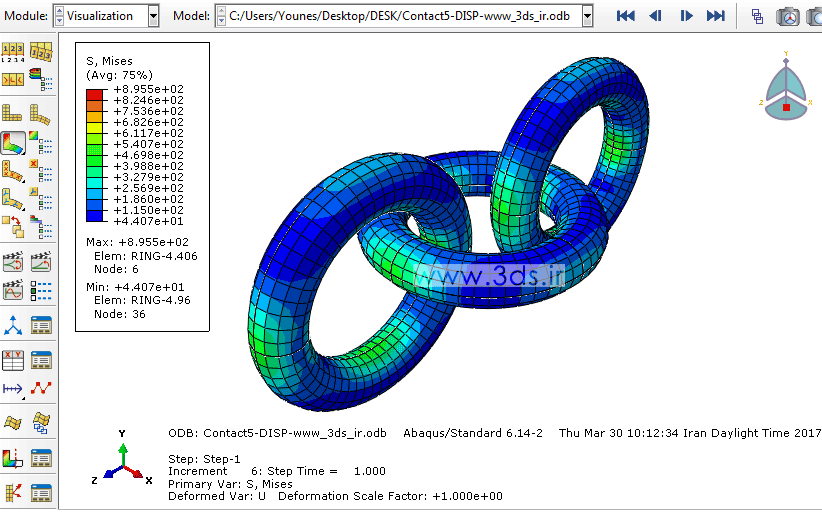
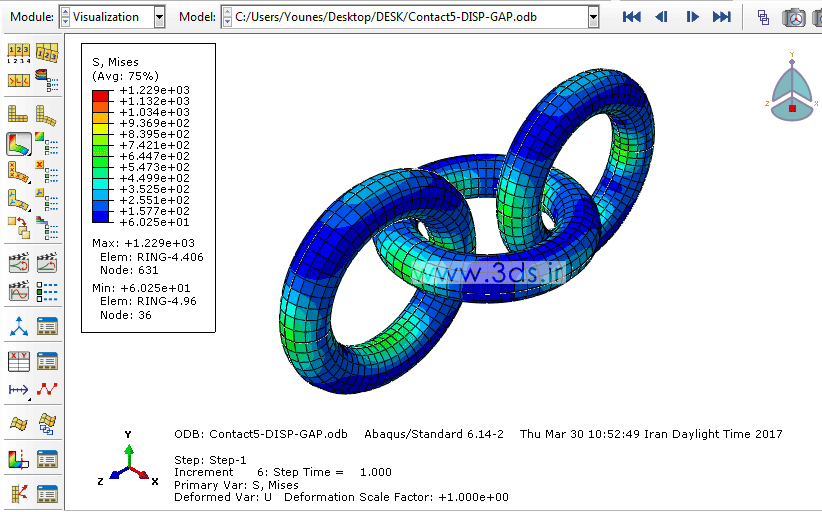
میتوانید با تصویر کردن مدل یک هشتم نسبت به صفحات سه گانه مختصات، مدل سهبعدی از حل مسئله را مورد بررسی قرار دهید.
حالت دوم: تأثیر بکارگیری Geometric Surface Smoothing در حل مسئله آباکوس
برای درک تأثیر بکارگیری تکنیک Geometric Smoothing از منوی اصلی، مسیر Model → Copy Model را انتخاب کرده و یک کپی از مدل Model-DISP که در گام قبل به حل آن پرداختید تهیه نمایید. سپس از منوی درختی بر روی مدل جدید دو بار کلیک کنید تا از انتخاب آن برای حل مطمئن شوید.
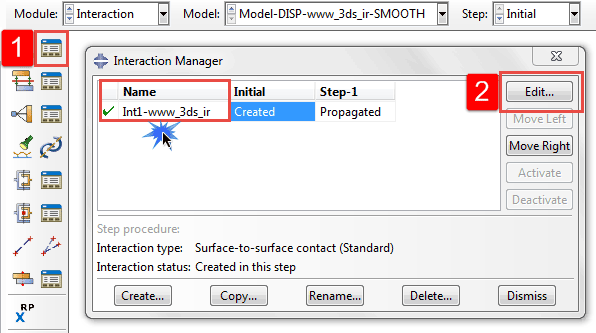
برای فعال کردن گزینه هموارسازی هندسی، به Contactی که قبلا تعریف کرده بودید مراجعه کنید و آنرا ویرایش نمایید.
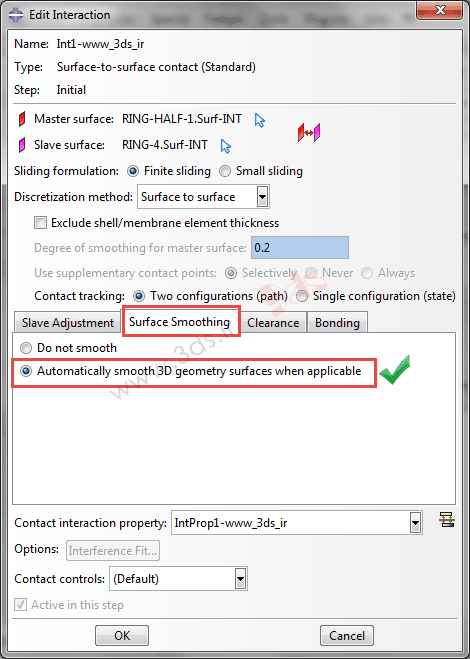
پس از کلیک بر گزینه Edit در پنجره باز شده به زبانه Surface Smoothing رفته و تیک گزینه Automatically smooth 3D geometry surfaces when applicable را فعال نمایید.
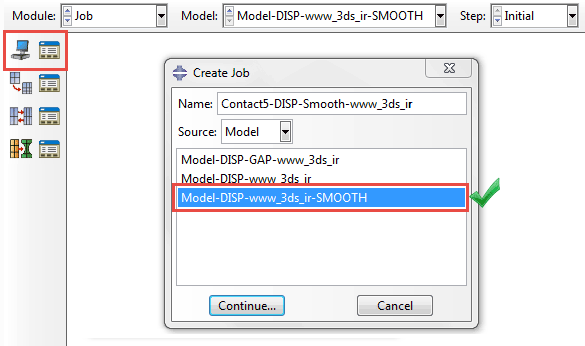
سپس یک Job جدید تعریف کرده و مسئله را حل نمایید (فراموش نکنید باید مدل جدید را در پنجره حل انتخاب کنید).
پس از اتمام حل، مجددآ از طریق گزینه Monitor تعداد Iterationهای لازم برای تکمیل فرآیند حل را بررسی کنید. تعداد Iterationها در این حالت نسبت به حالت اول باید عدد کمتری را نشان دهد؛ اما آیا این اتفاق افتاده؟!
بهدلیل سادگی در مدل هندسی تفاوت محسوسی مشاهده نخواهید کرد اما این تکنیک برای هندسههای پیچیده و مسائل بزرگ بسیار کارآمد خواهد بود. از آنجایی که هدف ما، آموزش نحوه فعالسازی این تکنیک در آباکوس بود، از مدل پیچیدهای استفاده نکردیم. اکنون که این تکنیک را فرا گرفتید میتوانید با خیال آسوده در مسائل پیچیده خود از آن استفاده کنید و تفاوت در زمان حل را لمس نمایید.
حالت سوم: جابجایی-کنترل با گپ اولیه
در این قسمت از نمودار درختی بر روی مدل Model-DISP-GAP دو بار کلیک کنید تا بهعنوان مدل حل انتخاب شود. مراحل ذکر شده در حالت اول برای تعریف خواص تماسی، تماس بین سطوح و اعمال شرط جابجایی به سطح مربوطه را مجدداً طی کنید (حالت Surface Smoothing که در بخش دوم فرا گرفتید را نیز فعال نمایید). برای این حالت جابجایی U3 را برابر 0.15 واحد در نظر بگیرید.
مجددا یک Job جدید تعریف کرده و مسئله را برای حل از روی مدل Model-DISP-GAP ارسال نمایید. نتایج حل را مورد بررسی قرار دهید. آیا تفاوت خاصی نسبت به حالت قبل مشاهده میکنید؟
وجود گپ یا فاصله برای یک مسئله جابجایی کنترل چندان مشکل بزرگی به حساب نمیآید. بدیهی است تفاوت خاصی را حس نکنید.
حالت چهارم: نیرو – کنترل با گپ اولیه
مدل Model-DISP-GAP را کپی کنید و نام آنرا به Model-Load-GAP تغییر دهید (از منوی اصلی و مسیر Model → Copy Model برای اینکار اقدام نمایید).
سپس در ماژول Load، شرط مرزی جابجایی را که در حالت سوم ایجاد کرده بودید، غیرفعال کنید. در ادامه و در step-1 یک بارگذاری از نوع Surface Traction با شدت 0.75 بر روی Surf-Load اعمال نمایید. فراموش نکنید مطابق راهنمای تصویری زیر بر روی بردار نشان داده شده مقابل عبارت Vector before Projection کلیک کرده و ابتدا مقدار (0,0,0) و سپس (0,0,1) را وارد نمایید.

مطابق معمول، یک Job جدید ایجاد کرده و مسئله را حل کنید. چه چیزی مشاهده میکنید؟
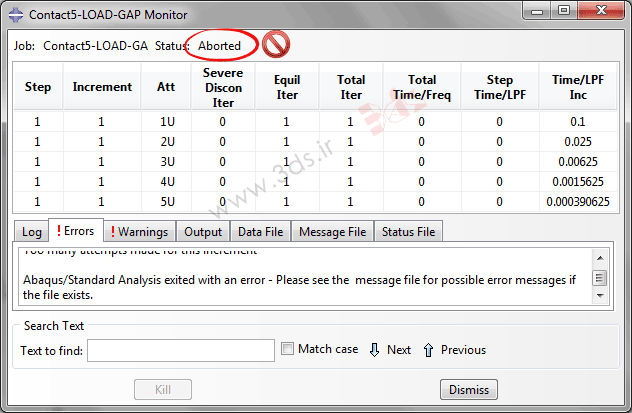
بله؛ همانطور که ملاحظه میکنید همگرایی رخ نداده و مسئله از حل خارج شده است. بار اعمال شده، یک حالت Rigid Body Motion یا حرکت جسم صلب را بر روی حلقه ایجاد میکند که بر اساس آن هیچ سختی یا Stiffnessی در مقابل تغییر شکل وجود ندارد؛ بهعبارت بهتر ماتریس سختی سیستم در این حالت منفرد شده (دترمینان ماتریس سختی برابر صفر شده است) و از نقطه نظر عددی امکان همگرایی در حل وجود ندارد.
اما جالب است بدانید که اگر مطابق حالت اول و دوم، گپ موجود را حذف کنید و دو قطعه از همان ابتدا با یکدیگر در تماس باشند، این مشکل رخ نخواهد داد. اگر هنوز از این آموزش خسته نشدهاید میتوانید خودتان این موضوع را امتحان کنید. کافیست در حالت اول، شرط جابجایی را با ترکشن سطحی فوق جایگزین نمایید.
حالت پنجم: نیرو – کنترل با گپ اولیه و Contact Stabilization
همانطور که مشاهده کردید، حالت نیرو-کنترل با وجود گپ اولیه، همگرایی حل را بسیار مشکل و تقریبا غیرممکن میکند در حالی که با جابجایی – کنترل این مشکل مرتفع خواهد شد. اما بدون شک استفاده از حالت جابجایی – کنترل همواره و در تمامی مسائل ممکن نیست. بسیاری از مواقع، جابجاییها بهعنوان پارامترهای مجهول در حل یک مسئله هستند و مقدار آنها متأثر از نیروهای معلومِ اعمالی است. بهعلاوه مونتاژ مجموعهای از قطعات که به شکل کامل با یکدیگر در تماس باشند در برخی مواقع غیرممکن خواهد بود. برای غلبه بر این مشکل، میتوان در فرآیند حل از تکنیک Contact Stabilization در آباکوس استفاده کرد.
برای این منظور، در مدل Model-LOAD-GAP یک Contact Stabilization جدید ایجاد کنید. کافیست در ماژول Intearction و از منوی اصلی، مسیر Intearction → Contact Contrlos → Create را مطابق شکل زیر دنبال کنید.

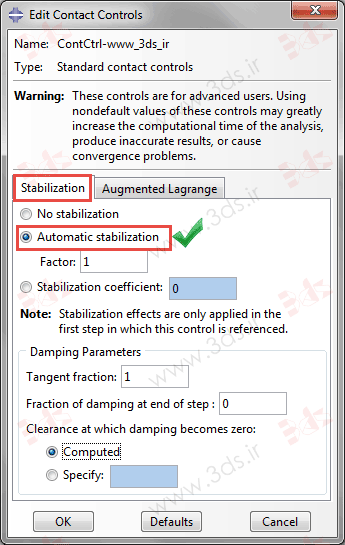
در زبانه Stabilization از پنجره باز شده گزینه Automatic Stabilization را انتخاب کرده و سایر پیشفرضهای موجود را بدون تغییر بپذیرید.
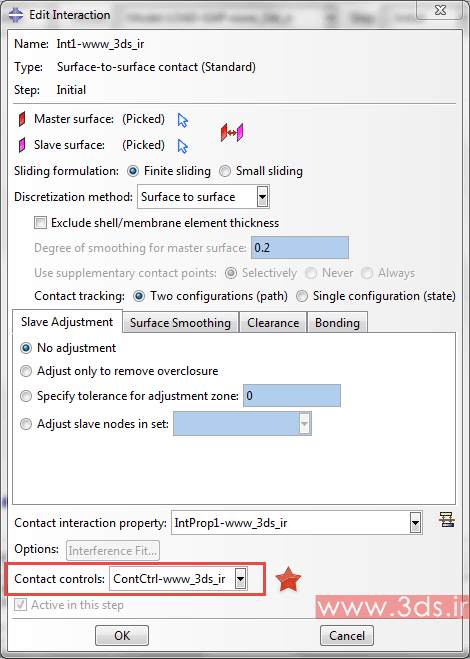
سپس تماس Surface-to-Surface تعریف شده در حالت قبل را مطابق شکل زیر ویرایش کنید:
آخرین گام برای درک عملکرد تکنیک پایدارساز تماس، حل مسئله فوق در ماژول Job خواهد بود. وقت آن رسیده که ببینیم همگرایی در حل به کمک Contact Stabilization رخ داده یا خیر؟
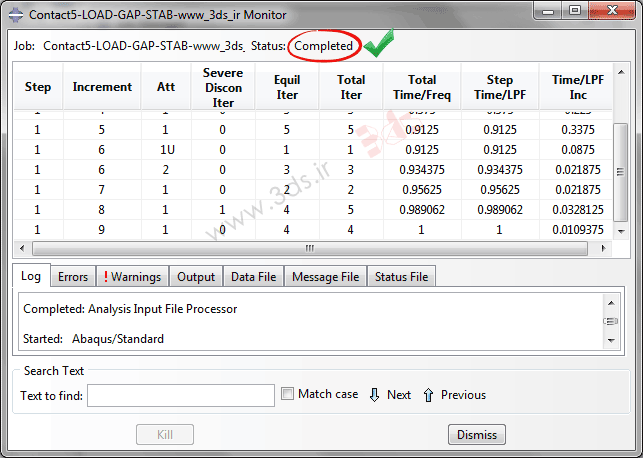
همانطور که ملاحظه میکنید، همگرایی در حل ایجاد شده و فرآیند حل مسئله کامل شده است.
امیدواریم بتوانید به نحو احسن از تکنیکهای بسیار حرفهای فوق استفاده کنید.

با سلام و تشکر از مطالب مفیدتون
خواهشمند است نحوه شبیه سازی جوشکاری لیزر در نرم افزار آباکوس رو هم آموزش دهید.
با تشکر
سلام
ممنون از پیشنهادتون
با سلام
از ارائه و نشر آموزش نرم افزار بسیار خوشنود و سپاس گذارم
بنده حدود 8 سال پیش با این نرم افزار آشنا شدم و تمامی این مسائلی که حال شما در حال نشر هستید با مشقت فراوان و جستجو طولانی یاد گرفتم و هر کسی هم به من رجوع کرد آموزش دادم.
امیدوارم با قدرت این راه را ادامه دهید و موفق و موفق تر باشید
سلام
از لطف شما سپاسگزارم
بسیار حرفه ای!!!!!!!!!! :/
اندازه 3-4تا کلاس چیزی یاد گرفتم
خیلی ممنون
موفق باشید
با سلام
آقای مهندس سروری بسیار عالی بود.
من یک مدل تماسی متشکل از یک تایر که با خاک در تماس است را ایجاد کرده ام. اکنون تحت تاثیر بار عمودی روی تایر مساحت تماسی تایر و خاک را با ایجاد یک History output میتوانم استخراج کنم. سوالی که دارم این است که آیا میتوان حجم تغییر شکل خاک را نیز در این آنالیز استخراج کنم؟ اگر امکان دارد بنده را در حل این مسئله کمک کنید.
ممنونم
سلام
میتونید با اسکریپت پایتون کار را پیش ببرید
سلام خدمت استاد گرانقدر
استاد وقتی مدلی داریم که از چندتا شکل تشکیل شده مثل همین مثال بالا که زنجیر سه تا حلقه داره اگر بخواهیم در قسمت ریسالت ها جداگانه هر کدام از این حلقه ها را نمایش بدهیم باید چکار کنیم؟؟
با تشکر
سلام
میتونید به روش زیر، قطعه اضافی را از دید خارج کنید و قطعه مورد نظر را ببینید و انتخاب کنید:
1- از مسیر tools ➺ display group ➺ create از منوی اصلی اقدام کنید، در پنجره ای که باز میشه و زیر بخش Item گزینه Faces را انتخاب کنید
2- پایین صفحه و زیر بخش Method بر روی Pick from viewport کلیک کنید
3- سپس در محیط کاری به انتخاب قطعه زائد بپردازید
4- در انتهای انتخاب قطعه اضافی دکمه وسط ماوس را بزنید تا به پنجره قبلی برگردید
5- حالا از پایین پنجره روی آیکون Remove کلیک کنید
با اینکار عملا قطعهای که اضافه است حذف میشه و شما میتونید تغییرات دلخواه را روی قطعات دلخواه باقی مانده اعمال کنید
در انتها هم با همین روش میتونید قطعه حذف شده را add کنید
با سلام و عرض خسته نباشی
بنده یک مدل از اتصال فولادی سرد نورد شده رو با آباکوس انجام میدم و در این مدل از یک صفحه سوراخدار و یک عدد استوانه به عنوان پیچ استفاده میکنم حال مشکل اینجاست که پس از مدلسازی و تحلیل مسئله، اثرات تماس در مسئله درنظر گرفته نمی شود ممنون میشم راهنمایی بفرمایید
سلام
اگر خواص تماسی مماسی و نرمال را به درستی تعریف کرده باشید مشکلی پیش نخواهد آمد
نکته خاصی وجود نداره
با سلام ممنون از پاسخگویی شما
امکانش هست راهنمایی بفرمایید خواص رو چجوری معرفی کنم که به مشکل برنخورم؟
نظری ندارم
به اندازه کافی مسئله برخورد و تماس در سایت موجوده
یه زحمت میکشیدید یه نگاه مینداختید و الگوبرداری میکردید
حتی تحلیل پرچ هم موجوده؛ سرچ کردن کار سختی نیست
با سلام و تشکر از راهنمایهایتان
سوال من در مورد مدلسازی جوش میباشد. اینکه چه مشخصاتی رو باید وارد کنیم و چگونه تعریف کنیم. من از آباکوس ٢٠١٧ استفاده میکنم که خودش در بین المان های conector جوش رو داره ولی من نمیدونم مشخصاتش رو چی باید بدم و چگونه تعریف کنم
سلام
در خصوص مدلسازی جوش در سایت مطلب موجوده
میتونید مطالعه کنید ممکنه مفید واقع بشه
با سلام و احترام
من یک دیوار دیافراگم را داخل خاک مدل کرده ام ابتدا محل دیوار دیافراگم را به عنوان حفاری تعریف کرده ام سپس دیوار دیافراگم را اضافه کرده ام. برای تعریف خاک از استپ geostatic و اندرکنش بین خاک و دیوار دیافراگم تعریف کرده ام در حالت غیر بار گذاری مدل run می شود و وقتی بار به آن اعمال میکنم با ارور too many attempt use for in this increment و در قسمت وارنینگ با اخطار displacement increment for contact is too big راه حلی که شما در این قسمت ارائه دادید را رفته ام ولی همچنان به ارور فوق بر میخورم.
وقتی استپ را در حالت static general قرار میدهم به ارور بالا بر نمخورم فقط در حالت geostatic ارور بالا پیش می آید با توجه به اینکه geo static رفتار خاک را نشان میدهد باید آن را تعریف کنم.
خواهشمندم راهنمایی کنید ماه ها است در گیر رفع ارور فوق هستم.
سلام
شاید خواص ماده که در حلگر geo static درگیر میشه را درست لحاظ نکردید
رفع این خطا به این سادگی نیست؛ باید گام به گام همه موارد را بررسی کنید
واحدها، درجات آزادی، شرایط اولیه و مرزی، سایز المان، تنظیمات step حل، مرتبه المان، شدت و نوع بارگذاری و . . .
عرض سلام
واقعا سایت کار آمدی دارید خیلی ممنون.
استاد من دو تا چرخدنده ساده رو شل مدل کردم حالا برای تعریف اینترکشن چرخدنده به ارور خوردم نمی دونم چرا ارور می ده. چون مسائل تماس هم خیلی کار کردم به نظرم نباید به مشکل می خوردم. این ارور رو می ده
Contact pair references surface/node-based surface/analytical rigid surface assembly_part-1-3_s1 but this surface/node-based surface/analytical rigid surface cannot be used with *contact pair. Check previous warning messages for this surface to find the cause.
تحلیلیم دینامیک اکسپلیسیت هست و کانتکت رو هم سورفیس تو سورفیس تعریف کردم با ضریب اصطکاک مشخص. به نظر شما مشکل کجاست اولا و دوما برای اینکه ران تایم کم بشه شل مدل کردم و گرنه اصلاً امکان حلش به لپ تاب من نیست. اگر سه بعدی مدل کنم مشکلی پیش نمی یاد اما به دردم نمی خوره.
سلام
در متن خطا هم اشاره شده؛ باید پیغام های خطای قبلی را بررسی کنید تا به سرنخ درستی برسید
در مورد استفاده از شل هم باید خدمتتون عرض کنم این یک موضوع دلخواه و در اختیار کاربر نیست؛ ورقها تئوری خاص خودشون را دارند
در مواقع خاص باید الزاماً از ورق استفاده کرد ولی در بقیه موارد ممکنه استفاده از شل به نتیجه درستی منجر نشه
ضمن قدردانی از مطالب آموزنده شما
سوالی که پیش اومده واسک اینه که اگر به طور کلی تعریف این گزینه ی کنترل تماسها آن هم به صورت اتوماتیک که فرمودید، مشکلی در نتایج ایجاد نمی کند و همچنین کاملا مشخص است که سرعت حل را نیز بهبود می دهد، پس چرا به صورت دیفالت فعال نیست؟ اگر فعال بود ممکن چه مشکلی در چه مسائلی پیش بیاید؟
وقتی شما به شکل مجزا تماس تعریف میکنید امکان تعریف خواص تماسی مجزا هم برای دو به دوی تماسها وجود داره و عملا کنترل شما روی مسئله بیشتره
سلام
وقت بخیر استاد
من در تعریف تماس دو قطعه از یک قاب فولادی به مشکل خوردم.(خطای too many attempts) میدهد.
زمانی که همه تماس ها رو به جوش (tie) تبدیل کردم مساله کامل حل شد. اما زمانی که تماس رو تعریف میکنم مجدد خطا میدهد. (یعنی مشکل از سطوح تماس است). مطابق با توضیحات شما کارهای زیر رو انجام دادم.
– شرایط مرزی به صورت جابجایی اعمال شده است.
– نوع تماس hard contact است.
– از روش surf to surf استفاده کردم.
– تیک گزینه Automatically smooth 3D geometry surfaces را هم فعال کردم.
اما باز هم پیغام خطای (too many attempts) میدهد!!
آیا باید مقدار اولیه initial increment ها را تغییر بدهم؟
ممنون بابت راهنمایی